
You may have noticed several small sensor boxes installed around the faculty lounge. These are part of an ongoing research project aimed at helping autonomous systems, such as robots – to better understand and navigate complex, dynamic indoor environments.
The sensors quietly and passively measure distances to nearby objects (like walls or people), without capturing any video, audio, or personally identifying information.
We use this anonymized data to study how shared spaces evolve throughout the day, so that robots can learn to localize effectively, even when people are moving or the environment changes.
What is localization?
Localization refers to the process by which a robot determines its position within an environment.
Just as humans orient themselves using visual and spatial cues, robots rely on sensor data to build an understanding of their surroundings.
Accurate localization is essential for safe and efficient movement, particularly in crowded or unpredictable spaces.
What are we trying to do?
Our goal is to develop robust localization techniques that remain accurate even in highly dynamic indoor settings, such as faculty lounges or shared kitchen areas.
We are specifically exploring approaches that leverage real-world sensor data combined with artificial intelligence to improve performance under conditions where traditional static mapping fails.
How is the data collected?
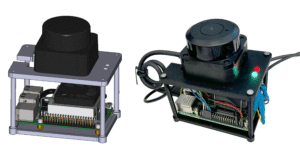
We have deployed several compact devices in the lounge area.
Each device includes:
-
A 2D LiDAR scanner, which uses laser pulses to measure distances in the surrounding environment
-
A Raspberry Pi computer for data processing and transmission
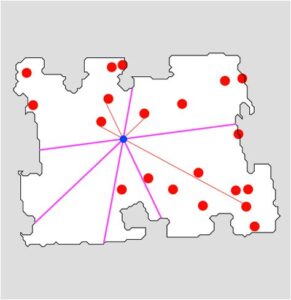
These devices periodically scan the environment, generating simple 2D distance maps (point clouds).
All sensors use Class 1 eye-safe lasers, certified for safe use in public environments.
Importantly, no images, audio, or personal data are recorded , only spatial measurements, which are entirely anonymous.
Example:
Privacy & Transparency
-
No cameras
-
No microphones
-
No identifying info
-
Only anonymous distance scans
If you have any questions or would prefer that we exclude data collected while you were present, even though the data cannot be linked to individuals, please don’t hesitate to contact us.
Contact & Feedback
We welcome your feedback and inquiries.
Email: michaelmoshe@mail.tau.ac.il
Visit us: Lab 446, Checkpoint Building, Tel Aviv University