
Workshop (Sadna)
Spring 2026
0368-3535-01
(in moodle ignore 0368-3535-02 and 0368-3535-03)
Lecture: Wednesday, 15:00-17:00, Room – Checkpoint 480
Instructors:
Dror Livnat, [email protected]
Michael Bilevich, [email protected]
Office hours by appointment
 |
 |
 |
Projects
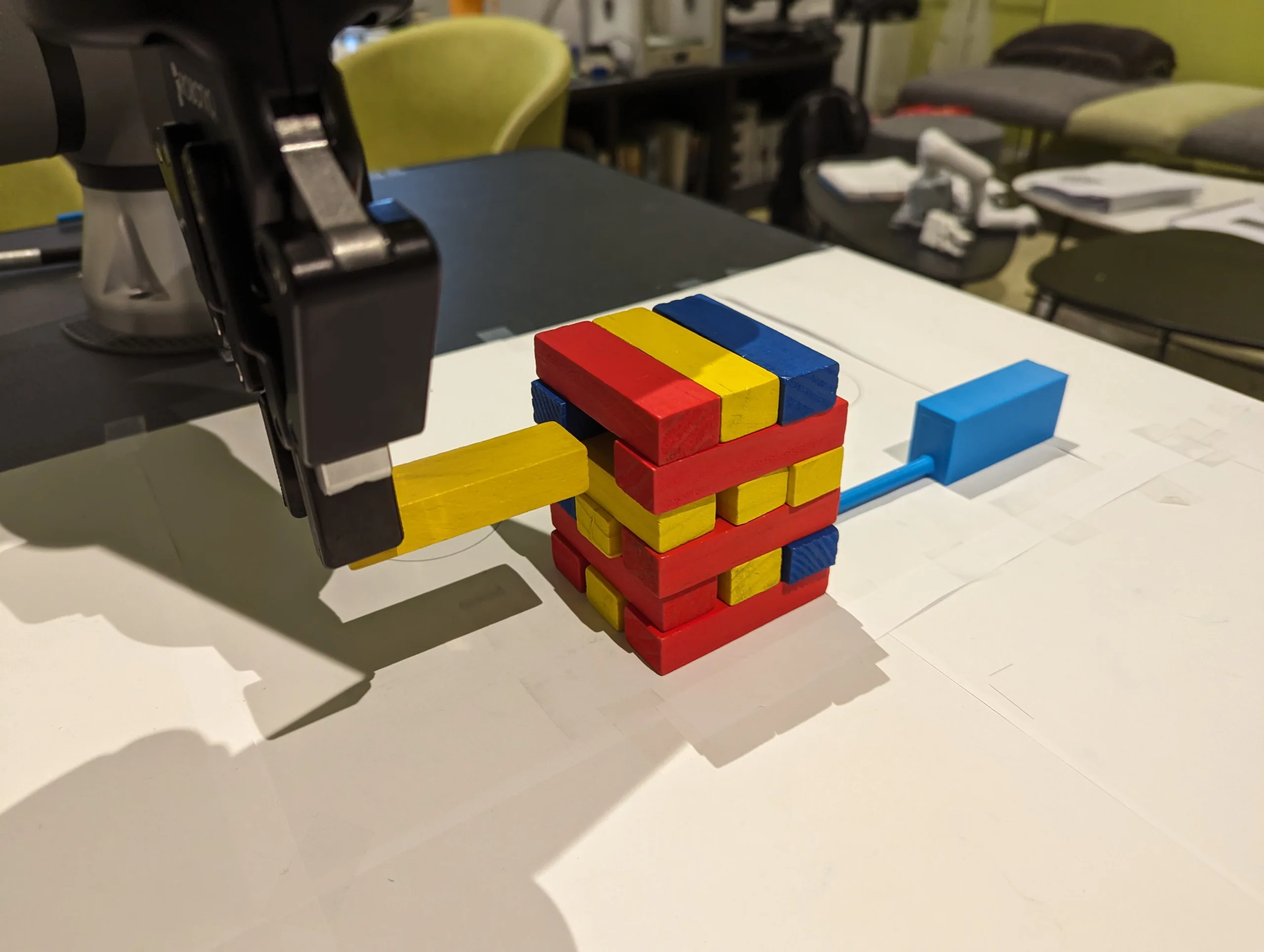
Robotics algorithms address the perception, planning, and control of autonomous systems operating in complex environments, with applications ranging from industrial automation and mobile robots to medical robotics, navigation systems, and interactive computer systems. In this workshop we will explore and apply algorithms for one of several robot systems. For example: (i) an industrial collaborative robotic arm (UR5e) playing Jenga, or writing on the board and erasing it (ii) a desk top robotic arm (myCobot 320) using chopsticks (iii) an autonomous vehicle (RoboMaster or a robotic vacuum cleaner) mapping and/or navigating the floor (iv) drones that need to carry out a prescribed task while avoiding obstacles on their way as well as other drones.
A typical project involves planning and implementing an application with a real world robot.
Class meetings
At the first meetings of the workshop, past projects and ideas for future ones will be discussed shortly. Then, students will gather into small groups and each group will decide on a project, define it, and work on it. In one of the first meetings, the basics of motion planning algorithms will be presented as an example of a core problem on the computer science side of robotics. Below is the complete list of expected class meetings. Exact dates for the meetings will be updated at a later time.
- 15-Apr-26 – Introduction of the workshop, review of potential projects, robots demonstration in the lab, teaming up (Checkpoint Building, room 480)
- 6-May-26 – Introduction to robot motion planning. Round table discussion on each planned project (Checkpoint Building, room 480)
- 13-May-26 – Project selection – each group presents their project plan, with an open discussion on each project (Checkpoint Building, room 480)
- 20-May-26 – ROS and individual robots instruction (Lab)
- 24-Jun-26 – Presentation of POC – (Room 480 and the Lab)
- Date TBD – Presentation of the final projects (Room 480)
Along the semester there will be separate/dedicated meetings with each team.
Submissions
Along the semester there will be a few mandatory milestones. Below is the complete list of expected submissions. Exact dates will be discussed and published in class. Each submission is to be carried by 23:59 on the submission date. Prior to each submission, a dedicated submission box will be created in the course Moodle, together with detailed submission instructions. Each submission will be carried once per team, by one of the team members.
- 6-May-26 – Team members details and a short description of the project (up to one page)
- 13-May-26 – Project plan will be presented in class and submitted in moodle
- 24-Jun-26 – POC presentations plus a short clip
- TBD — Final project presentation, software package, user manual, programmer manual, video clips
Teamwork
The project is intended to involve a significant amount of teamwork. The recommended team size is three. Each team will design a project together with the course staff, develop it along the semester and the exams’ break, and submit it at a TBD date.
Bibliography: click here
Projects: Following are a few past projects.
 Kinova Arm Writing on the Board |
 Drones Bouncing a balloon using two drones |
 Few Reads Localization Localization from few distance measurements |
 Smooth Driving Fast obstacle navigation without dropping cargo |
TidyBot Best Workshop Award winner |