


Workshop (sadna)
Fall 2023-2024
0368-3535-01
(in moodle ignore 0368-3535-03)
Lecture: Wednesday, 14:00-16:00, Check Point 180
Instructor: Dan Halperin, danha@tauex.tau.ac.il
Office hours by appointment
Teaching assistant: Dror Livnat (drorlivnat at mail tau ac il)
Software helpdesk: Michael Bilevich (michaelmoshe at mail tau ac il)
Projects
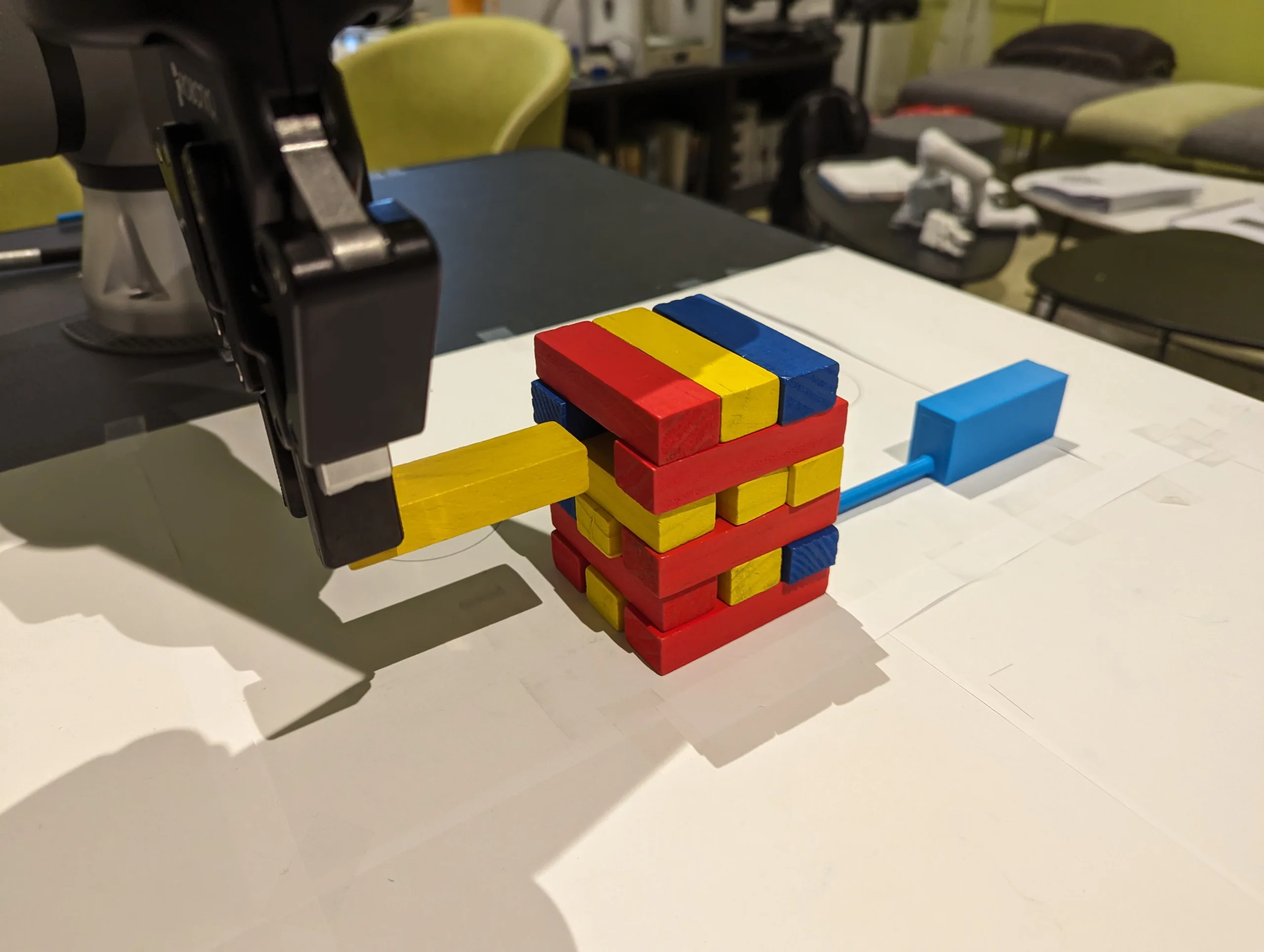
Motion planning algorithms compute collision-free motion paths for objects that move among obstacles. They arise in robotics, graphical animation, surgical planning, navigation systems, computational biology and computer games, among other domains. In this workshop we will explore and apply algorithms for one of several robot systems. For example: (i) an industrial collaborative robotic arm (UR5e) playing Jenga, or writing on the board and erasing it (ii) a desk top robotic arm (myCobot 320) using chopsticks (iii) an autonomous vehicle (RoboMaster) mapping and/or navigating the floor (iv) drones that need to carry out a prescribed task while avoiding obstacles on their way as well as other drones.
A typical project involves implementing motion planning algorithms for a robotic arm, a drone, or a mobile robot in the real world.
Class meetings
At the beginning of the workshop, the very basics of motion planning algorithms will be presented, and possible projects will be laid out. Below is the complete list of expected class meetings. Exact dates for the meetings will be updated at a later state.
- 3-Jan-24—Introduction to robot motion planning + suggested projects + robots demonstration in the lab + teaming up (Room Check Point 280)
- 10-Jan-24—More background, individual / team talks – discuss planned projects (Room Check Point 180)
- 17-Jan-24—Project selection – individual meetings with each team in the robotics lab (Check Point building, room 446) – there will be no class meeting that week
- 24-Jan-24—Presentation of project plan (Room Check Point 180)
- 13-Mar-24—Presentation of POC – (Room Check Point 380)
- 21-Jul-24—Presentation of the final project (16:00, Check Point 420)
Along the semester there will be separate/dedicated meetings with each team.
Submissions
Along the semester there will be a few mandatory milestones. Below is the complete list of expected submissions, together with their dates. Each submission is to be carried by 23:59 on the submission date. Prior to each submission, a dedicated submission box will be created in the course Moodle, together with detailed submission instructions. Each submission will be carried once per team, by one of the team members.
- 10-Jan-24—Team members details and a short description of the project (up to one page)
- 24-Jan-24—Project plan as presented in class
- 13-Mar-24—POC presentation as presented in class
- 21-Jul-24—Final project presentation, software package, user manual, programmer manual, video clips
Teamwork
The project is intended to involve a significant amount of teamwork. The recommended team size is three. Each team will design a project together with the course staff, develop it along the semester and the exams’ break, and submit it at a TBD date.
Bibliography: click here
Projects: Following are a few past projects.

Writing on the Board

Bouncing a balloon using two drowns that play in turns, keeping the balloon in the air

Estimating the location of a Robomaster robotic vehicle based on few distance measurements in a know environment

Passing cargo in a known environment with obstacles as fast as possible without dropping it, using Robomaster robotic vehicle

Sorting different types of waste using multi-arm UR5 setting in PyBullet simulation

Preparing an autonomous boat to an international competition