Skip to content
Home
Projects
People
Courses
Seminar
CGAL Arrangement Book
Devices & Website
Home
Projects
People
Courses
Seminar
CGAL Arrangement Book
Devices & Website
Search
Search
Home
»
People
»
Oren Salzman
Oren Salzman
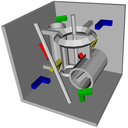
Motion Planning for Multi-Link Robots by Implicit Configuration-Space Tiling
Efficient high-quality motion planning by fast all-pairs \(r\)-nearest-neighbors
Asymptotically-Optimal Motion Planning using Lower Bounds on Cost
Asymptotically near-optimal RRT for fast, high-quality, motion planning
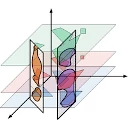
Finding a Needle in an Exponential Haystack: Discrete RRT for Exploration of Implicit Roadmaps in Multi-Robot Motion Planning
Sparsification of Motion-Planning Roadmaps by Edge Contraction
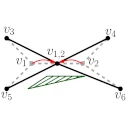
Motion Planning via Manifold Samples
Yair Oz - Webcreator
Contact
Mobile.
052-4703139
|
WhatsApp
Email.
[email protected]
Name
טלפון
אימייל
הודעה
Send